
Features
[기술 리포트] 폭설 시나리오: 차량용 센서별 인지 성능 데이터 분석
폭설이 내리는 고속도로는 자율주행 시스템이 마주할 수 있는 가장 가혹한 ‘엣지 케이스(Edge Case)’ 중 하나다. 이 상황에서 자율주행차의 대응책을 분석하고, 센서 퓨전의 필요성을 제시한다.
폭설이 내리는 고속도로는 자율주행 시스템이 마주할 수 있는 가장 가혹한 ‘엣지 케이스(Edge Case)’ 중 하나입니다. 가시거리가 50m 미만으로 떨어지고 노면 반사가 심한 상황에서 각 센서가 어떻게 반응하는지, 시뮬레이션 데이터와 기술적 근거를 바탕으로 알아 본다.
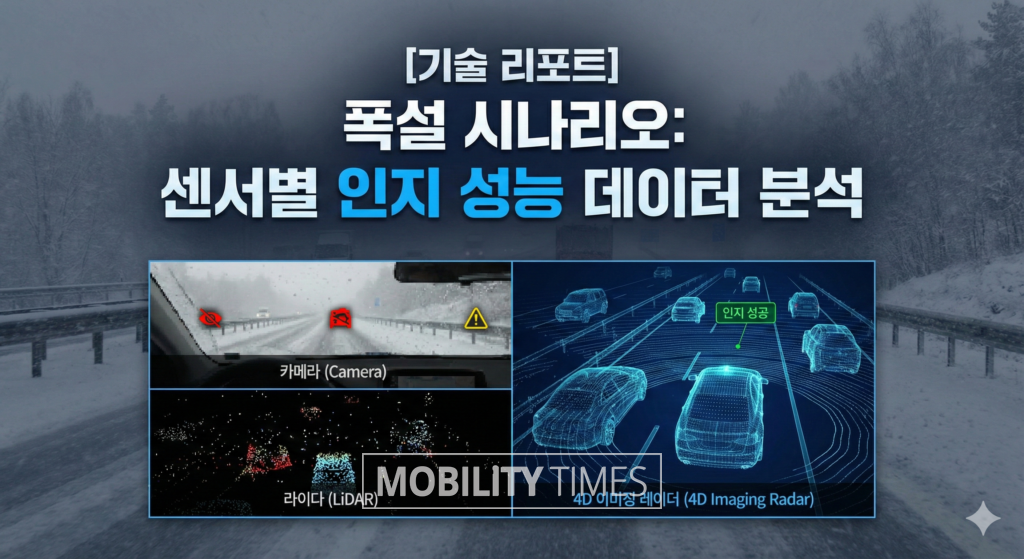
1. 카메라 (Camera): 화이트아웃(Whiteout)과 픽셀 포화
카메라는 인간의 시각과 유사한 한계를 공유한다. 눈 입자가 렌즈 앞을 가리거나 전조등 빛이 눈에 반사되어 ‘화이트아웃’ 현상이 발생하면 인지 능력이 급격히 상실된다.
- 시뮬레이션 결과: 픽셀 노이즈가 80% 이상 증가하며 차선 인식률이 20% 이하로 급락한다.
- 기술적 한계: 눈 입자에 의한 빛의 산란으로 객체의 외곽선(Edge)을 추출하는 것이 불가능해진다. 와이퍼가 작동하더라도 센서 전면의 결빙이나 습기는 데이터의 심각한 왜곡을 초래한다.
2. 라이다 (LiDAR): 후방 산란(Backscatter) 노이즈
라이다는 짧은 파장의 레이저를 사용하므로 대기 중의 눈 입자에 직접적인 영향을 받는다. 레이저가 물체에 닿기도 전에 눈송이에 맞고 돌아오는 ‘고스트 오브젝트(Ghost Object)’ 현상이 핵심 문제이다.
- 시뮬레이션 결과: 유효 감지 거리가 평시 대비 70~80% 감소한다. 200m 앞을 보던 라이다가 폭설 시에는 30~40m 앞의 장애물조차 식별하기 어려워진다.
- 기술적 한계: 수만 개의 레이저 빔 중 상당수가 눈송이에 반사되어 ‘노이즈 포인트 클라우드’를 형성한다. 이를 필터링하는 과정에서 실제 장애물 데이터까지 손실될 위험이 크다.
3. 표준 3D 레이더: 투과력은 좋으나 분별력 부족
레이더는 상대적으로 긴 파장을 사용하므로 눈송이를 통과하여 물체에 도달하는 능력이 탁월하다. 하지만 해상도가 낮아 위험 상황을 정확히 판단하기 어렵다.
- 시뮬레이션 결과: 전방에 물체가 있다는 것은 인지하지만, 그것이 ‘쌓인 눈더미’인지 ‘정지한 트럭’인지 구분하지 못한다.
- 기술적 한계: 높이 데이터가 없어 도로 위에 낮게 깔린 눈과 차량을 동일한 평면의 물체로 인식한다. 이로 인해 불필요한 급제동(Phantom Braking)이 발생할 확률이 높다.
4. 4D 이미징 레이더: 폭설 속 유일한 ‘전천후 눈’
4D 이미징 레이더는 레이더의 ‘투과성’과 라이다 수준의 ‘해상도’를 결합하여 폭설 상황에서 가장 독보적인 성능을 보여준다.
- 시뮬레이션 결과: 폭설 속에서도 150m 이상의 유효 감지 거리를 유지한다. 고밀도 포인트 클라우드를 통해 장애물의 형태를 파악하고, 높이 데이터를 활용해 노면의 눈과 실제 차량을 정확히 구분한다.
- 기술적 강점: 가상 채널 기술을 통한 서브-디그리(Sub-degree) 수준의 각도 분해능 덕분에 눈송이 사이를 뚫고 들어온 반사파만 정밀하게 추출하여 이미징한다.
차량용 센서 벤치마크 리포트
| 구분 | 카메라 (Camera) | 표준 3D 레이더 | 4D 이미징 레이더 | 라이다 (LiDAR) |
| 주요 감지 데이터 | 형태, 색상, 텍스트 | 거리, 속도, 방위각 | 거리, 속도, 방위각, 높이 | 정밀 거리, 정밀 형태 |
| 해상도 (Resolution) | ◎ 매우 높음 | △ 낮음 | ○ 높음 (이미지급) | ◎ 매우 높음 |
| 악천후 대응력 | × 취약 (안개, 우천) | ◎ 매우 우수 | ◎ 매우 우수 | △ 보통 (산란 현상) |
| 조도 영향 (빛) | × 매우 취약 (야간) | ◎ 영향 없음 | ◎ 영향 없음 | ○ 영향 적음 |
| 객체 분류 능력 | ◎ 매우 우수 | △ 단순 구분 | ○ 우수 (분류 가능) | ◎ 매우 우수 |
| 거리 측정 정밀도 | △ 소프트웨어 의존 | ○ 우수 | ◎ 우수 | ◎ 매우 정밀 |
| 데이터 처리량 | ◎ 매우 높음 | △ 낮음 | ○ 보통 | ◎ 높음 |
| 시스템 비용 (BOM) | ◎ 매우 저렴 | ◎ 저렴 | ○ 보통 (중가) | × 고가 |
| 2026년 주요 트렌드 | 엣지 AI 기반 인지 | 도어/트렁크 등 보조 | 라이다 보완 및 대체 | 솔리드 스테이트 소형화 |
비고. ◎: 매우 우수 / ○: 우수 / △: 보통 / ×: 미흡
(출처. 아이씨엔 미래기술센터)
[결론] 센서 퓨전(Sensor Fusion)의 필요성
시뮬레이션 분석 결과, 폭설과 같은 악천후에서 자율주행의 신뢰성을 담보할 수 있는 핵심 센서는 4D 이미징 레이더이다. 하지만 단독 센서만으로는 완벽할 수 없기에 다음과 같은 보완 전략이 필수적이다.
- 레이더 중심 인지(Radar-centric Perception): 악천후 시 카메라나 라이다의 데이터 가중치를 낮추고, 4D 이미징 레이더의 데이터를 우선순위에 두는 가변적 알고리즘 적용.
- 에이전틱 AI 필터링: 엣지 단에서 AI가 실시간으로 눈송이 노이즈와 실제 객체 신호를 분리하는 ‘지능형 필터링’ 기술 고도화.
[끝]

모빌리티(Mobility)의 미래 비즈니스 전략을 찾다
- 모빌리티타임즈 (mobilitytimes.net)






![]()
e-Mail: mobi@icnweb.co.kr
e-Mail: mobi@mobilitytimes.net
-

 Features2개월 ago
Features2개월 ago현대자동차, 186조 매출로 증명한 ‘모빌리티 대전환’의 서막
-

 News2개월 ago
News2개월 ago아리아드네의 실타래가 된 ‘티링커’, 반포에서 자율주행의 길을 열다
-

 Products2개월 ago
Products2개월 ago시야의 한계를 넘는 ‘제3의 눈’… 현대차·기아, UWB로 자율주행 사각지대 지운다
-

 News2개월 ago
News2개월 ago[이슈] 안개 속의 전기차, 테슬라의 자율주행 도박과 거인들의 하이브리드 귀환
-

 News2개월 ago
News2개월 ago현대오토에버, ‘기능안전 국제표준’ 인증으로 검증 장벽 넘다
-

 Global2개월 ago
Global2개월 ago성층권에서 터지는 5G… 에어스팬-스페이스 컴퍼스, ‘하늘 위 기지국’ 띄운다
-

 News2개월 ago
News2개월 ago“노트북 챙길 필요 없습니다”… 드론 비행 로그, 이제 스마트폰으로 ‘즉시 분석’
-

 News2개월 ago
News2개월 ago지상에서 하늘까지, 당신이 머무는 모든 곳이 ‘이동’이 된다